產品介(jiè)紹
動(dòng)態(tài)調平係統在(zài)多個領域都有應用,民用領域(yù)如智能起落架、轉運床、艦船穩定平台、機動車載(zǎi)武(wǔ)器、空(kōng)中作業平(píng)台、醫療車、醫療船、海上(shàng)作業平台等動態工況。
在動態(tài)調平係統中,調平控製(zhì)器接收傾角傳感器輸出的縱傾角和橫傾(qīng)角信息,經過動態調平算法計算後,通過驅動係統(tǒng)控製各(gè)支腿的伸出和縮回,使工(gōng)作(zuò)平台上(shàng)的縱傾角和橫傾角一直(zhí)達到要求的水平精度(dù)內,是整個係統的(de)中央邏輯處理單元(yuán)。西安sg99.xy丝瓜视频科技股份有限(xiàn)公司推出的調平控製器產品采用28V電源輸入,具有使用方便、可靠性高、環(huán)境適應性強等(děng)特點。
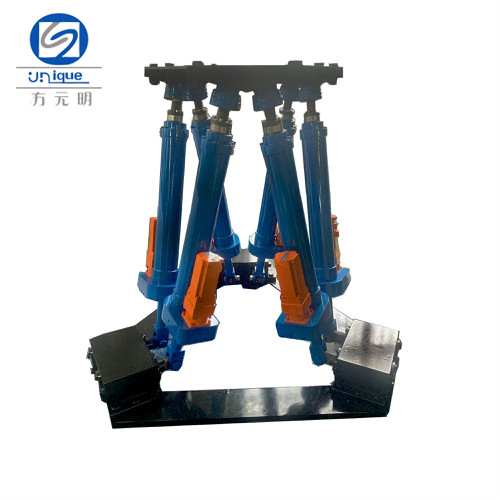
動態(tài)調平係統主要由機械支撐傳動係統和控製(zhì)係統(tǒng)組成。以智能起落架的動態調平係統為例,主要組成如下:

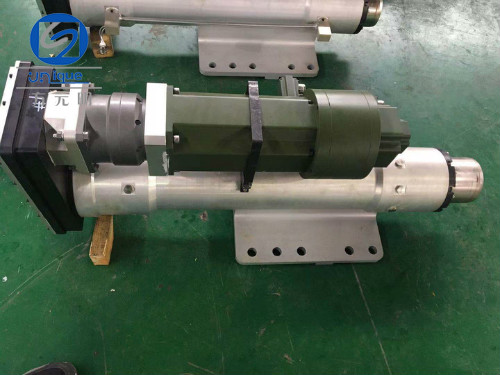
a)平(píng)台機械支撐傳動係統:主要(yào)由若幹(gàn)隻電動缸(主要由傳動裝置、減速裝置組成),3台伺服電機(jī);
b)主要由1隻傾角傳感器、3台測(cè)距儀(智能起落架(jià));
c)控製係統: 1台(tái)調平控製器、3台驅動器組成、調平控製麵板(bǎn)、電源組件與線纜等組成。
主要組成部分的功能介紹:
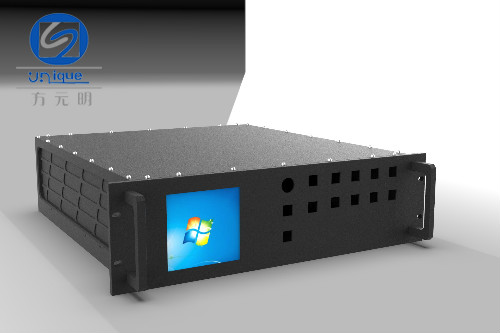
1)調平控製(zhì)麵板:用於信息顯示與按鈕操作;
2)調平控製器:調平控製器負責(zé)接收調平(píng)控製麵板的指令(lìng)並進行解析,采集傾(qīng)角傳感器與測距(jù)儀的信(xìn)息,通過總線控製下位(wèi)動作係(xì)統進行調平撤收支撐動(dòng)作,是整個(gè)係統的中央(yāng)邏輯處理單元;
3)驅動器:驅動器接收調平控製器的指令,驅動(dòng)電機(jī)旋轉,使電動缸完成規定的動(dòng)作。驅動器(qì)可以在轉矩、轉速、位置模式下驅動電機穩(wěn)定運行;
4)傾角傳感(gǎn)器:傾角傳感器是多(duō)點動態調平係統關鍵的器件之一,其(qí)精度和安(ān)裝位(wèi)置(zhì)決定了多(duō)點調平係統的精度。同時傾角傳(chuán)感器響應(yīng)的快慢也是決定係統能否快(kuài)速(sù)調平的關鍵因素之(zhī)一(yī);
5)測距儀:用於測量距地距離信息;
6)伺服電機:直接動作單元,由驅動(dòng)器控製運動,附帶電磁製動器,用於電機(jī)自鎖;伺服電機帶有絕 對值編碼器,用(yòng)於(yú)實(shí)時反饋電動缸運行信息;
7)電動(dòng)缸:機械動作執行單元,主要由減速器、絲杠、軸承(chéng)以及接近開關開關等組成;它的作用為將電機的轉動輸出,經過減速器減速(sù)後將動力傳動到絲杠,再經旋轉(zhuǎn)傳動轉化為電動(dòng)缸的直線伸出和縮回;
8)電源組件:向調平調平控製器、驅動器、傾角(jiǎo)傳感器等用電設備供電。

圖1 動態調平係統組成

圖2 控製器、伺服驅(qū)動器與伺服電機(jī)關係示意圖
產品特點
1、操作簡單、快(kuài)捷
通過操作控製器麵板,可對係統進行(háng)自動(dòng)控製,對支腿進行手動控製。
2、狀態(tài)顯示齊全
控製器設置了(le)一係列狀態(tài)顯示信息,方便客戶(hù)在調試、運行(háng)過程中瀏覽了解係統和支(zhī)腿的實時相關狀態參數。
3、控製簡單、靈(líng)活
可對控製器內部參數進行修改,以適應不(bú)同應有環境和要求。
4、精度高、頻率高
控製器采用動態調平(píng)算法結合公司自主(zhǔ)電動缸產品(pǐn),連續調平精度最高可(kě)達並穩定(dìng)於45′以內,控(kòng)製係統采用高響應的電機驅動器及傾角傳感器,調平頻率高。
1、自適應起落(luò)架
直升機(jī)作為一種旋翼飛行器,具有機動靈活、起降方便的特點,因(yīn)此在作戰、偵查、反潛、救護(hù)等方麵(miàn)具有非常廣泛(fàn)的應(yīng)用。相比於陸地起降的直升機,艦載直(zhí)升機在起降時需要麵對更具挑戰的動(dòng)態(tài)搖擺(bǎi)艦麵,一旦艦麵搖晃(huǎng)劇烈或飛行員操作失誤,極易引發安全事故(gù)。目(mù)前的艦(jiàn)載直升機降落常常借(jiè)助於助降係統,為艦麵和直升機配(pèi)套相應連接裝(zhuāng)置,在提高安全性的同時,卻增加了結構複雜性(xìng)和機體載荷。因此,本(běn)產品可以主動適應地形的自(zì)適應起(qǐ)落架,來解決艦載(zǎi)直升(shēng)機搖擺艦麵降(jiàng)落(luò)的(de)難題(tí)。
自適應起(qǐ)落架包含三條(tiáo)支撐腿,前支撐腿稱為前起落架、後兩條支撐腿組成主起落架,每條支撐腿由兩個伺服電動缸驅動;慣導測量單(dān)元由陀螺儀和加速度計組成,安裝在機體上,可以用來檢測機體在各方向上的傾角及加速度,並(bìng)將此信息反饋給控製係統;三台對(duì)地測(cè)量裝(zhuāng)置分別安裝在起落架各支撐腿的末端,可以檢測各支撐腿末端(duān)與預定落足點之間的(de)距離,並將此信息反饋給控製係統;運動控製和(hé)伺服驅動係統嵌(qiàn)在機體內,用來控製(zhì)和(hé)驅動(dòng)伺服電動缸的動作。
2、智能轉運(yùn)床
傳(chuán)統的轉運床沒有自穩定和自動(dòng)升降(jiàng)功能,在病人的轉移或者(zhě)運輸過程中,由於轉(zhuǎn)運麻煩和顛簸等原因造成病人的身體不(bú)適和二次受傷等多方麵原(yuán)因(yīn)。如(rú)今,隨著科技和智(zhì)能(néng)機器人的發展,我司的智能轉運(yùn)床能夠實現上平麵在顛(diān)簸的路麵或者搖(yáo)晃的艦船上(shàng),能夠能夠自(zì)動調整轉運床的位姿,使其時刻處於平穩狀態,且在在有需要時,還可以實現平台的升降(jiàng)功能。
3、艦船穩(wěn)定平台
主(zhǔ)要運用於海麵上發射以(yǐ)及發射回收,動態調平係統可以調整發射及回收平台(tái)的狀態,使其處(chù)於平穩狀態。
4、海上(shàng)作業平台
工程船在海(hǎi)上作業時,由於海浪引起的船體的搖(yáo)擺和晃動,影響(xiǎng)工程船在海上的(de)工程作業,所以將動態調平運用(yòng)於海上作業平台,可進行(háng)平台的姿態調整來實現自穩定。